Magnetically Steerable, Soft-Bodied Continuum Robots
This invention is a magnetically steerable, small-scale, soft-bodied continuum robot that has diverse medical applications in minimally invasive procedures, such as cerebrovascular and endovascular neurosurgical procedures.
Researchers
-
magnetically steerable continuum robotic guidewires for neurovascular applications
United States of America | Granted | 11,779,422 -
magnetically sterable continuum robotic guidewires for neuovascular applications
United States of America | Granted | 11,103,324 -
magnetically sterable continuum robotic guidewires for neuovascular applications
United States of America | Pending -
magnetically sterable continuum robotic guidewires for neuovascular applications
Italy | Granted | 4,021,330 -
magnetically sterable continuum robotic guidewires for neuovascular applications
Ireland | Granted | 4,021,330 -
magnetically sterable continuum robotic guidewires for neuovascular applications
Switzerland | Granted | 4,021,330 -
magnetically sterable continuum robotic guidewires for neuovascular applications
European Patent Convention | Granted | 4,021,330 -
magnetically sterable continuum robotic guidewires for neuovascular applications
Spain | Granted | 4,021,330 -
magnetically sterable continuum robotic guidewires for neuovascular applications
Netherlands | Granted | 4,021,330 -
magnetically sterable continuum robotic guidewires for neuovascular applications
United Kingdom | Granted | 4,021,330 -
magnetically sterable continuum robotic guidewires for neuovascular applications
France | Granted | 4,021,330 -
magnetically sterable continuum robotic guidewires for neuovascular applications
Germany | Granted | 4,021,330
Figures

Demonstration of ferromagnetic soft continuum navigating a 3D cerebrovascular phantom network.
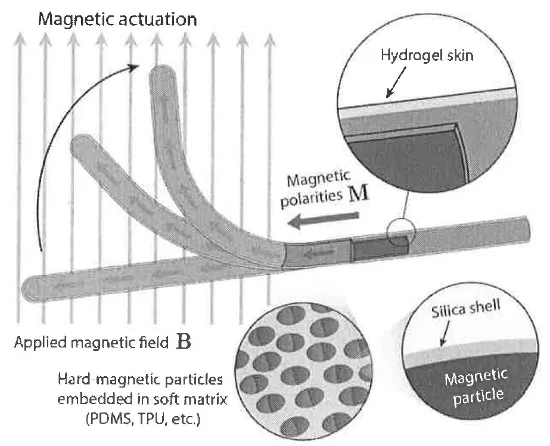
Depiction of the magnetically-responsive tip of the continuum robot with programmed magnetic polarities resulting from magnetic particles embedded in the soft polymer matrix. The hydrogel layer provides a lubricating layer on the robot’s surface, and the silica shell coating the magnetic core prevents corrosion upon exposure to hydrated interfaces.
Technology
This invention is a ferromagnetic soft-bodied continuum robot that can be fabricated by 3D printing of thermoplastic polymers and silicone-based ferromagnetic composites. The robot is composed of a soft polymer matrix containing ferromagnetic particles, which enable magnetic actuation of the robot when external magnetic fields are applied. This composition facilitates remote omnidirectional steering and navigation of the robot through a desired path, such as the neurovascular system. To reduce friction while the robot navigates through complex and constrained environments, the surface of the robot can be coated with a thin layer of hydrophilic polymers for lubrication. To expand the robot’s medical applications, various functional cores can be incorporated inside of the soft composite matrix. For example, one or a bundle of optical fibers can be included to enable imaging, illumination, or laser delivery.
Problem Addressed
Robotic systems present a novel strategy for remotely controlled, minimally invasive surgical procedures, such as stroke intervention. However, conventional robots are comprised of a series of rigid links, joints, and actuators; this composition limits their mobility and is unsuitable for navigating through narrow and complex systems such as the cerebrovascular anatomy to reach target lesions. Continuum robots, in contrast, are built with flexible materials, and they can achieve complex motion through their ability to bend upon deformation. It should be noted that existing continuum robots still contain some rigid components and are limited to millimeter scales due to miniaturization challenges of conventional actuation mechanisms. This invention is a submillimeter-scale, soft-bodied continuum robot capable of steering and navigating through complex and constrained environments upon remote actuation by externally applied magnetic fields.
Advantages
- Submillimeter-scale of robot is optimal for minimally invasive procedures
- Better steerability than conventional robots due to exclusion of rigid components
- Ferromagnetic particles allow robot to be steered remotely
- Incorporation of various functional cores allows for diverse surgical functions
- Teleoperable to enable remote surgery in rural areas with limited access to hospitals
Publications
Yoonho Kim, et al. Ferromagnetic Soft Continuum Robots. Science Robotics. 2019 Aug 28. doi: 10.1126/scirobotics.aax7329
Liu Wang, et al. Hard-Magnetic Elastica. Journal of the Mechanics and Physics of Solids. 2020 Sept. doi: 10.1016/j.jmps.2020.104045
Sign up for technology updates
Sign up now to receive the latest updates on cutting-edge technologies and innovations.